|
Dohyeok Lee I'm a first year Ph.D. student at Cognitive Machine Learning Laboratory, advised by Prof. Jungwoo Lee, in Department of Electrical and Computer Engineering at Seoul National University (SNU). Previously, I received my M.S. in ECE from SNU in 2024 and B.S. in EE from KAIST in 2020. Research Keywords: Robot Learning, Robotics, Learning from Demonstration (LfD), Reinforcement Learning (RL). Email / CV / Google Scholar / Github / LinkedIn |
|
Research VisionHow can we leverage physics understanding to make robot learning truly generalizable? My research focuses on empowering robots with physical understanding to achieve robust generalization across diverse manipulation scenarios — when agents truly understand the physics and affordances of their environment, they can adapt to novel scenarios beyond their training distribution. I develop algorithms that leverage spatiotemporal dynamics, combining novel view synthesis and dynamics prediction to enable robots to make informed decisions on unseen data. My vision is to create robotic systems that discover and apply underlying principles to solve any robotic task, achieving human-level adaptability in unstructured environments. |
Publications |
|
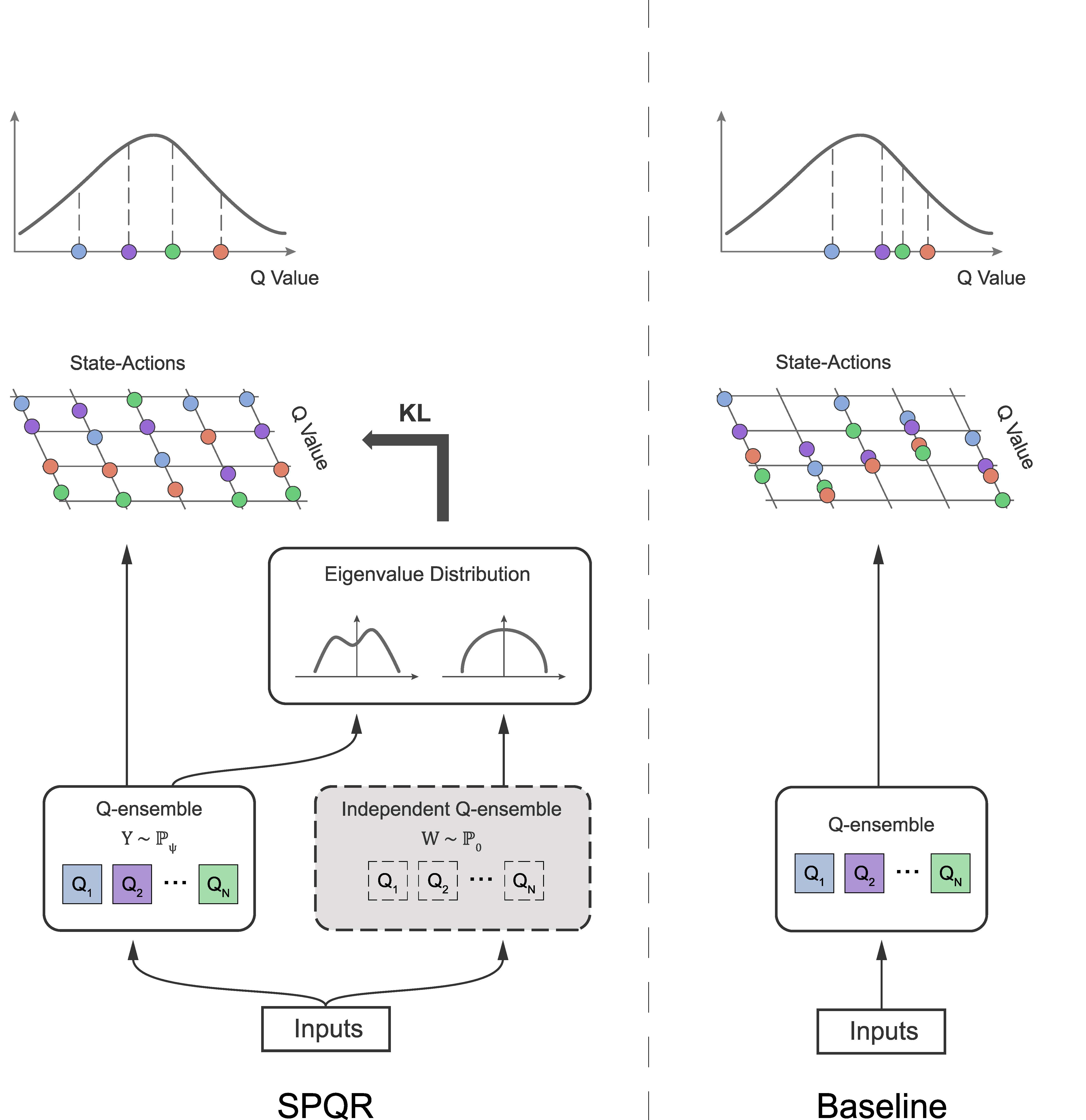
SPQR: Controlling Q-ensemble Independence with Spiked Random Model for Reinforcement Learning
Dohyeok Lee, Seungyub Han, Taehyun Cho, Jungwoo Lee NeurIPS, 2023 paper / code We proposed SPQR, the first theoretically-grounded independence regularization for ensemble Q-learning based on random matrix theory. By ensuring proper independence, our approach significantly improves generalization to out-of-distribution data across diverse RL tasks. |

|
ARTificial Expressions: Human-Robot Interactive Drawing
Yejin Kim, Dohyeok Lee CVPR Demo, 2023 (Best Demo) code We created ARTE, a real-world human-robot collaborative drawing system with multi-modal goal-conditioned policy. This work validates our generalization aprroaches in actual deployment, demonstrating robust performance across diverse drawing scenarios and human interaction patterns. |
|
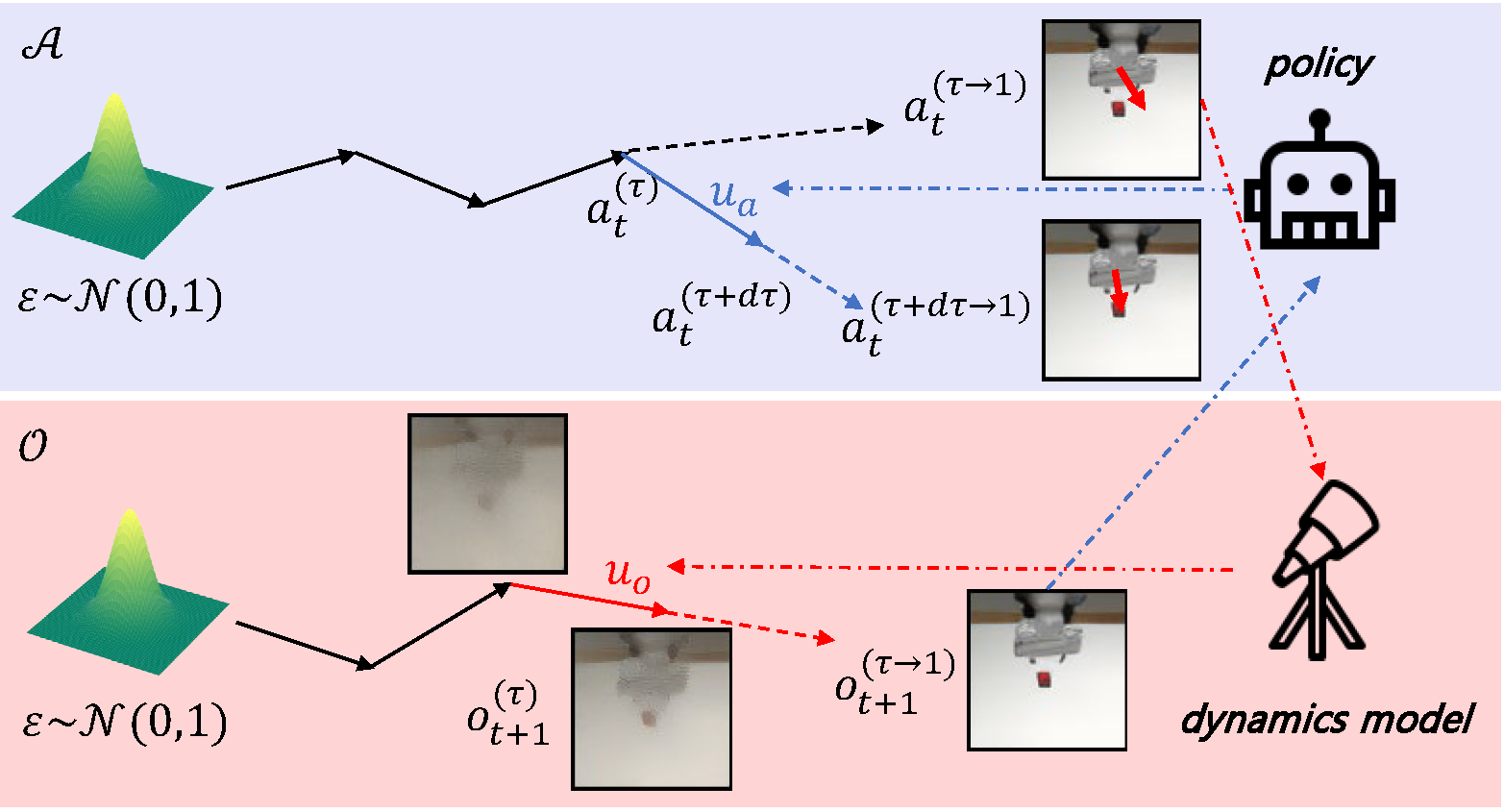
Dynamics-Aligned Flow Matching Policy for Robot Learning
Dohyeok Lee, Jung Min Lee, Munkyung Kim, Seokhun Ju, Seungyub Han, Jin Woo Koo, Jungwoo Lee CVPR Embodied AI Workshop, 2025 paper We address temporal understanding by learning explicit dynamics and mutually correct dynamics models and policy by iterative flow generation. Our key insight: random trajectory data (zero annotation cost) enables robust generalization beyond expert demonstrations to out-of-distribution scenarios. |
|
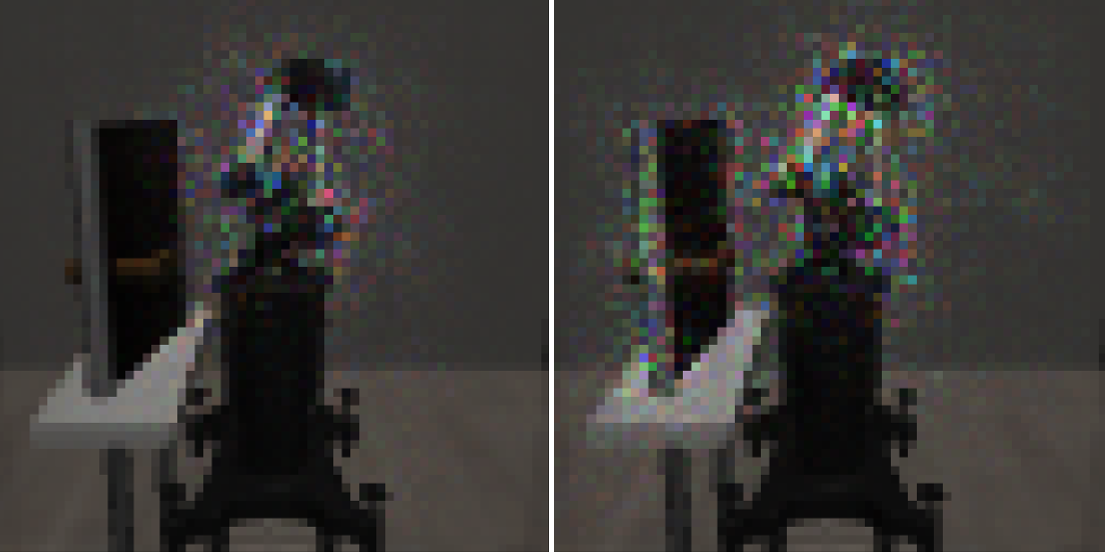
View-Imagination: Enhancing Visuomotor Control with Adaptive View Synthesis
Dohyeok Lee, Munkyung Kim, Jung Min Lee, Seungyub Han, Jungwoo Lee CVPR Embodied AI Workshop, 2025 paper We tackle spatial understanding challenges where fixed cameras fail during occlusions. Our approach leverages novel view synthesis to generate optimal viewpoints, enabling robust generalization to unseen spatial configurations and visual ambiguities. We proposed View-Imagination, a novel framework that dynamically selects optimal camera viewpoints for robotic manipulation using adaptive view synthesis. Based on our key insight that the most informative viewpoint is scene-dependent, View-Imagination trains a learnable viewpoint policy enabling robots to actively resolve visual ambiguities like occlusions. |
 
|
Control of Furuta Pendulum with Reinforcement Learning
Dohyeok Lee, Usama Mohammad, Dong Eui Chang ICCAS, 2019 video We implemented robust control for the Furuta pendulum with in-the-wild and sim2real training across diverse tasks. This work established our commitment to real-world robust RL agents. |
Work ExperiencePrior to my Ph.D., I gained hands-on robotics experience at two startups, building complete robotic systems from hardware to deployment. This practical background informs my current research on making learning algorithms work reliably in real-world settings. |
|
Robotics Engineer
D.Hive (startup), Daejeon, Korea 2020.10 - 2021.04
|
|
|
Robotics Engineer Intern
Crazing Lab (startup), Pangyo, Korea 2019.06 - 2019.08
|
Open Source Contribution |
|
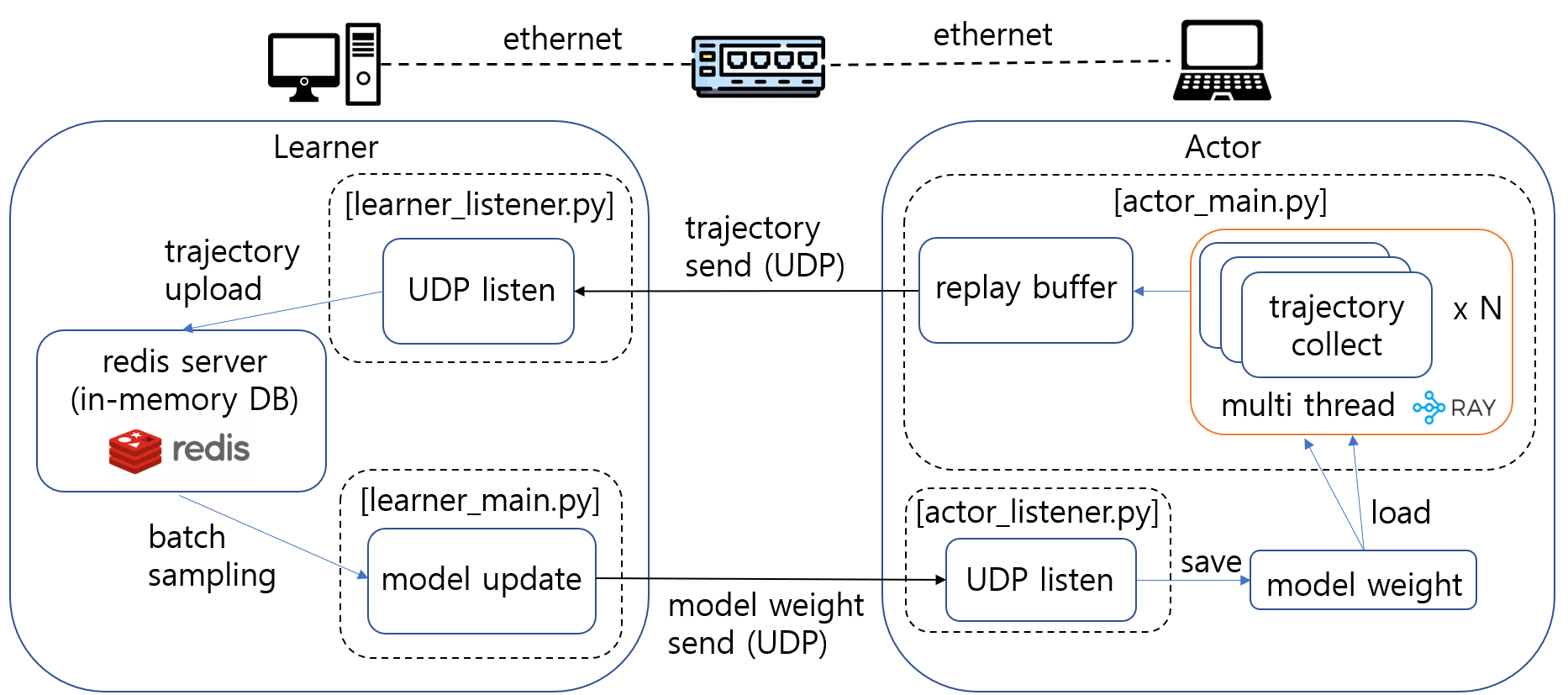
IMPALA
Open Source Contribution, 2024 code Implemented IMPALA(Scalable Distributed Deep-RL with Importance Weighted Actor-Learner Architectures) in distributed system with ray, redis, and UDP |
|
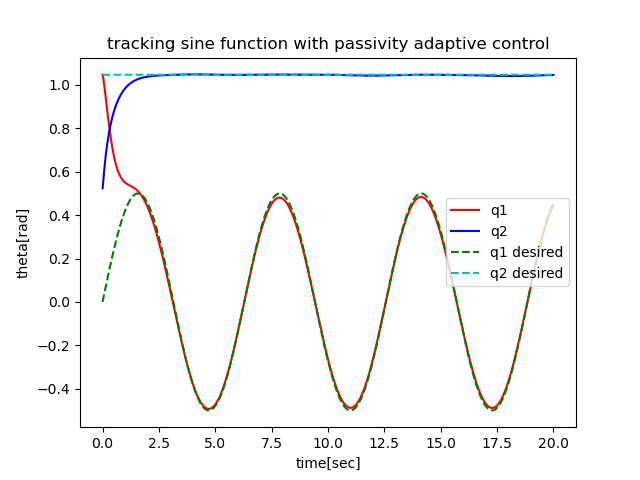
Nonlinear Controller (★20)
Open Source Contribution, 2021 code Implemented nonlinear control (robust, adaptive, sliding mode) algorithms on two-arm manipulator simulator |
|
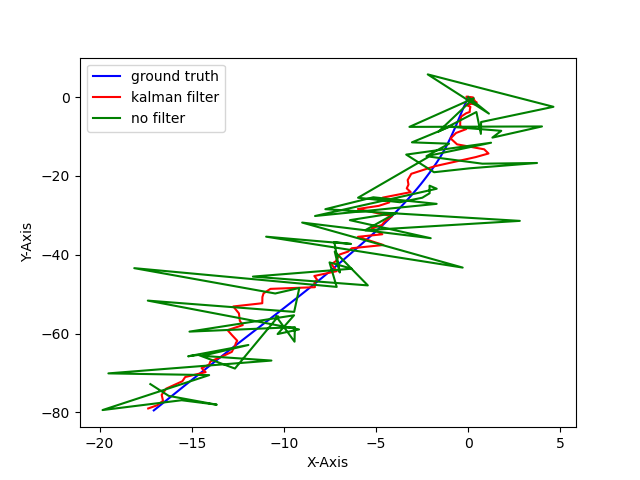
EKF (★14)
Open Source Contribution, 2021 code Implemented EKF(Extended Kalman Filter) for sensor fusion of GPS and IMU data with Kitti dataset |
|
RRT
Open Source Contribution, 2021 code Implemented RRT(Rapid Random Tree) algorithms |
Robotics Project |

|
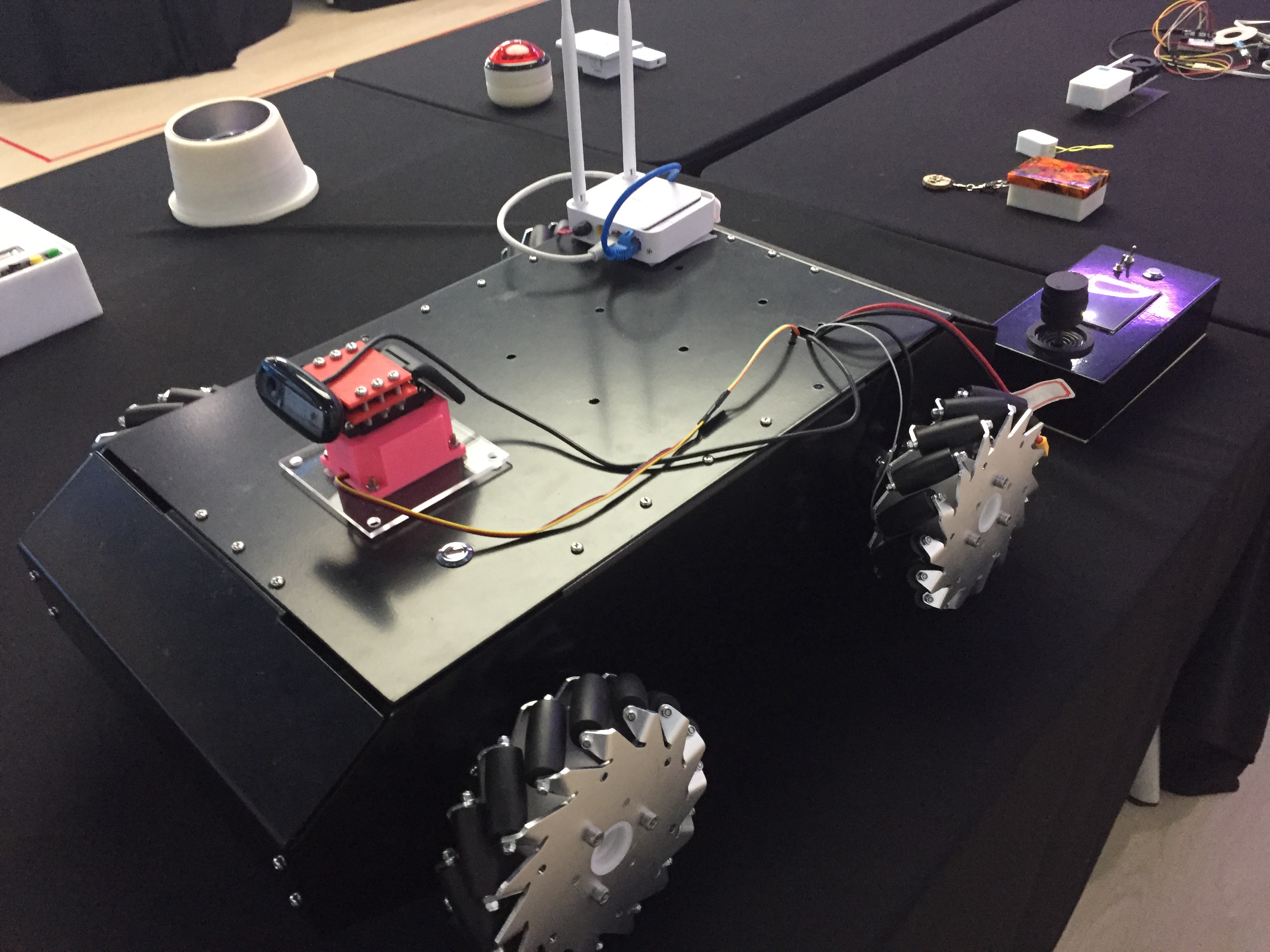
Mobile Humanoid
Course Project at SNU (Actuation and Sensing Mechanisms for Robots), 2024 Collaborator: Dohyeok Lee, and 23 students Developed wheel-based humanoid for navigation and object manipulation |
|
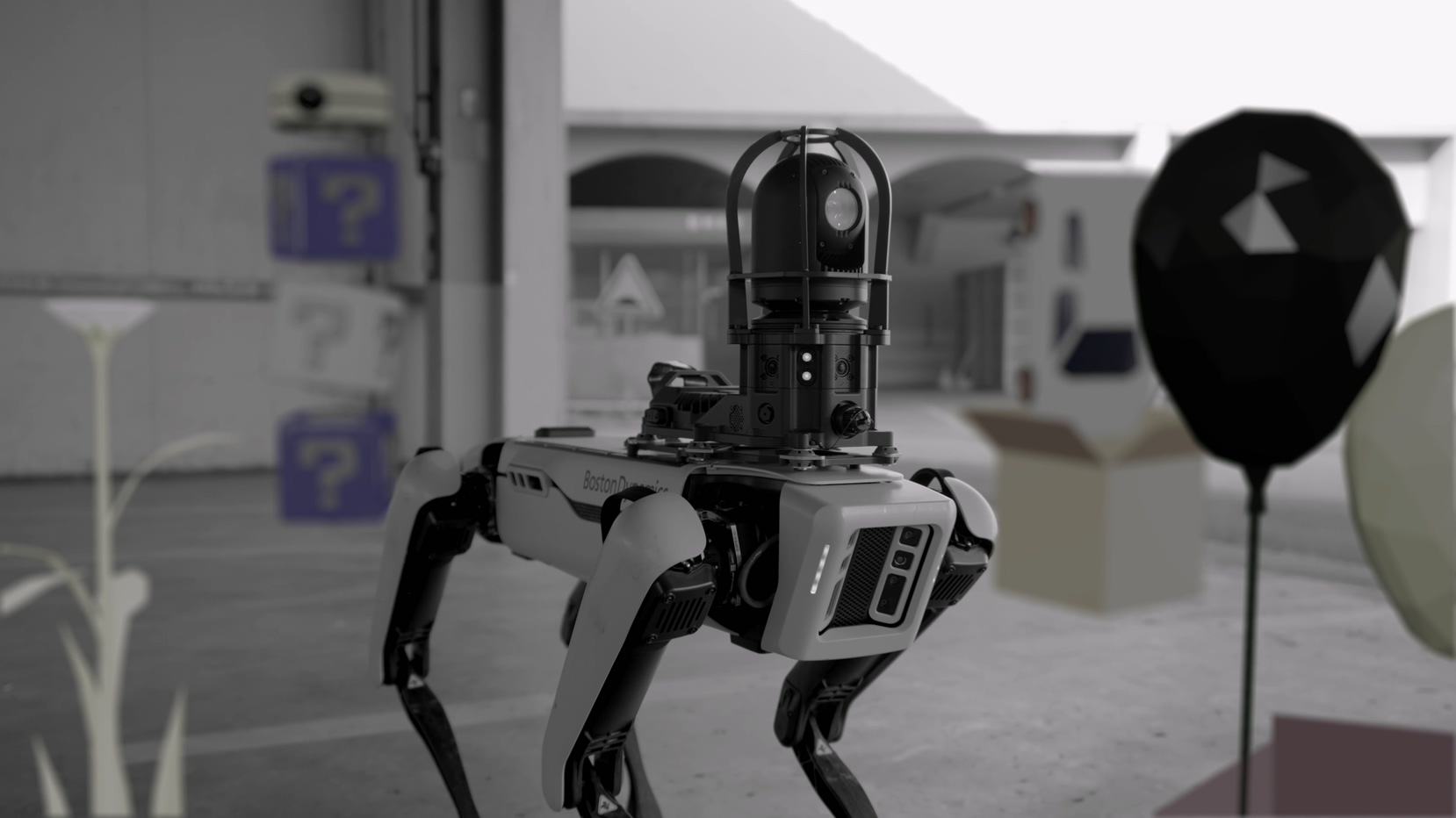
Robot-AR system
In collaboration with Zer01ne(Hyundai Motor Company), 2021 Collaborator: Minyoung Kim, Yejin Kim, Dohyeok Lee, Junyoung Kim, Sunho Chang video1 / video2 Developed Unity-ROS pipeline for AR visualization of Boston Dynamics Spot, enabling intuitive robot control system |

|
Vender
In collaboration with Art Center Nabi, 2020 Collaborator: Minyoung Kim, Dohyeok Lee, Seonguk Seo, Taewon Kang, Dahye Lee, Daeun Kim video Created AI media artwork with AI based emotion recognition and autonomous vending machine system |
|
Autonomous Mobile Robot
In collaboration with robotics club MR, KAIST, 2018 Collaborator: Dohyeok Lee, Inyub Kim, Yongmin Lee, Dokyun Lee video Developed autonomous mobile robot with YOLO, Tmap API, GPS and compass sensor, etc. |
|
Hand-shape Manipulator with Teleoperation
In collaboration with robotics club MR, KAIST, 2017 Collaborator: Dohyeok Lee, Jaemin Cho, Jinsub Lee, Kiheon Sung Developed hand-shape manipulator and glove-shape interface for teleoperation |
|
Marker-based Mobile Robot
In collaboration with robotics club MR, KAIST, 2016 Collaborator: Duckyu Choi, Hwijoon Lim, Dohyeok Lee Developed mobile robot for marker-based localization and mapping |
Other Research Project |
|
Minimum distortion embedding for RL
Taehyun Cho, Dohyeok Lee, Jungwoo Lee KICS Winter Conference, 2023 preprint / code Proposed isometric regularization for RL to minimize distortion of latent space embedding |
|
Separated batch ensemble DQN
Dohyeok Lee, Jungwoo Lee KICS Winter Conference, 2023 code Proposed separated batch ensemble DQN for diversification of ensemble using separated batch for Bellman Q-target |
|
Genetic Algorithm for Surface Decomposition
Research Project, 2022 code Implemented genetic algorithm for earth surface decomposition with arbitrary basis function |
|
Simulator and Reinforcement Learning Algorithms for Surveillance/Reconnaissance
Changsik Lee, Dohyeok Lee, Dong Eui Chang KIMST Conference, 2020 Developed simulation environment for surveillance/reconnaissance and reinforcement learning algorithms for surveillance agent |

|
3D Box Fitting
In collaboration with RCV KAIST, 2018 Collaborator: Dohyeok Lee, Jaekook Hyun Developed 3D box fitting algorithm for given point cloud data, collaboration with Hubo lab |
Miscellanea |
| Service: Reviewer for NeurIPS 2025, CoRL Workshop 2024, ITW 2024 |
|
template adapted from here. |